



Conception optimale de robots à câbles
Méconnues, les architectures reposant sur le principe de robots à câbles offrent de nombreux avantages : modularité, transportabilité et espace de travail notamment. La modélisation reste toutefois complexe car de nombreux paramètres influent sur l’équilibre entre cout et robustesse.
Avantages concurrentiels
- Modularité
- Transportables
- Vitesse de déplacement
- Déploiement rapide
- Grand espace de travail
Applications
- Robotique
- Charges lourdes
- Impression 3D
- Outdoor
- Inspection
Propriété intellectuelle
- Code logiciel
Étape de développement
Preuve expérimentale de conception
Laboratoire
Institut Clément Ader
Description
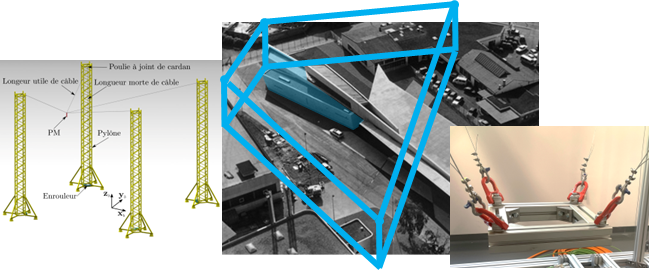
CoBoCable permet d’optimiser l’architecture mécanique d’une plateforme mobile de robots à câbles, dans des conditions variées, en intérieur comme en extérieur.
Grâce à leur conception simple et modulable, les robots à câble sont particulièrement adaptés à des déploiements de grande envergure. Ils peuvent également supporter de lourdes charges. Cependant, de nombreux paramètres influent sur leur comportement : tension, élasticité, géométrie et masse linéique des câbles, répétabilité des enrouleurs, déformations et vibrations de la structure, conditions extérieures, etc.
La solution logicielle CoBoCable développée à l’institut Clement Ader permet d’optimiser l’ensemble des paramètres de conception, tout en limitant le nombre de capteurs nécessaires à l’étalonnage, réduisant ainsi les temps de calcul et la complexité de la commande.
Spécifications techniques
2 modules logiciels :
- Interface de commande sur Siemens
- Recherche de l'architecture optimale en Matlab