
Liens de partage



Sustainable & digital engineering
Advanced materials
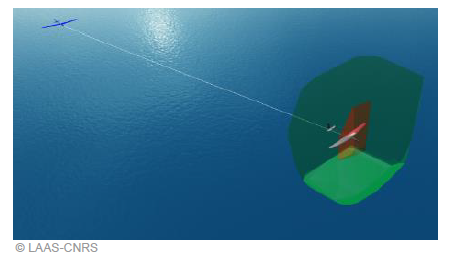
LOCAFLEET: real-time state estimation algorithm with a 100% guarantee
Content created on
Established state estimators (Extended Kalman Filter, Unscented Kalman Filter) calculate probabilistic position, velocity or acceleration zones. The approximate nature of the assumptions (error distribution of prediction models and sensors) on which these methods are based may invalidate the probability zones calculated by these methods. This raises safety issues for critical applications such as collision avoidance and fleet management
COMPETITIVE ADVANTAGES
- 100% guaranteed
- Not highly conservative
- Real-time
- Easy to integrate
APPLICATIONS
- Space: Satellite constellation control, debris avoidance, etc.
- Drones: Fleet management for training flights, Geofencing, etc.
- Aeronautics: Air Traffic Management, Collision Avoidance System, etc.
- Automotive: Automatic braking and collision avoidance system, etc.
INTELLECTUAL PROPERTY
- Patent
DEVELOPMENT STAGE
Laboratory validation of the technology
LABORATORIES
- LAAS CNRS
Description
The technological solution that has been developed is based on set-based estimation to provide location zones and guaranteed speed or acceleration ranges in real time.
The key points of the current system are:
- Algorithm providing a 100% guarantee that the actual state of the observed system is within the estimated range
- Not highly conservative, “real-time” estimation
- Simple integration into a system architecture, as it can be implemented on a conventional embedded board and uses existing sensors
- Suitable for non-linear systems
- Suitable for observation delays and uncertainties in observation times
Technical specifications
- Probability of results: 100% guarantee
- Implementation: Can be embedded on conventional boards
- Processing frequency: 1 Hz (in its current version)